
Multimodal Sensor Calibration
Group Leaders: Dr. rer. nat. Martin Lauer and Dr. Carlos Fernández López
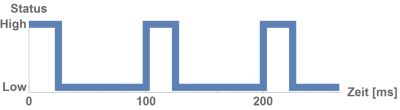
Triggerbox
Autonomous driving requires data from several different sensors. By using the internal clock of each individual sensor, the measured data is asynchronous and suffers from drift. The triggerbox solves this problem by generating an external trigger signal for all sensors to ensure synchronous measurements. The timestamps of the trigger signal and the internal sensor clocks are used to match the trigger timestamps with the corresponding sensor data.
Contact: M.Sc. Christian Kinzig and M.Sc. Kaiwen Wang
Extrinsic Calibration of Multi Sensor Systems
Autonomous vehicles are equipped with a great variety of sensors. The sensors need to be calibrated to enable rich perception of the environment by fusion information of different sensors. That makes the process of calibrating sensors essential for autonomous driving and robotic systems in general. We develop a powerful framework for calibrating state-of-the-art autonomous vehicles with sensors such as cameras, LiDARs and radars.
Contact: Dr. rer. nat. Martin Lauer or Dr. Carlos Fernández López
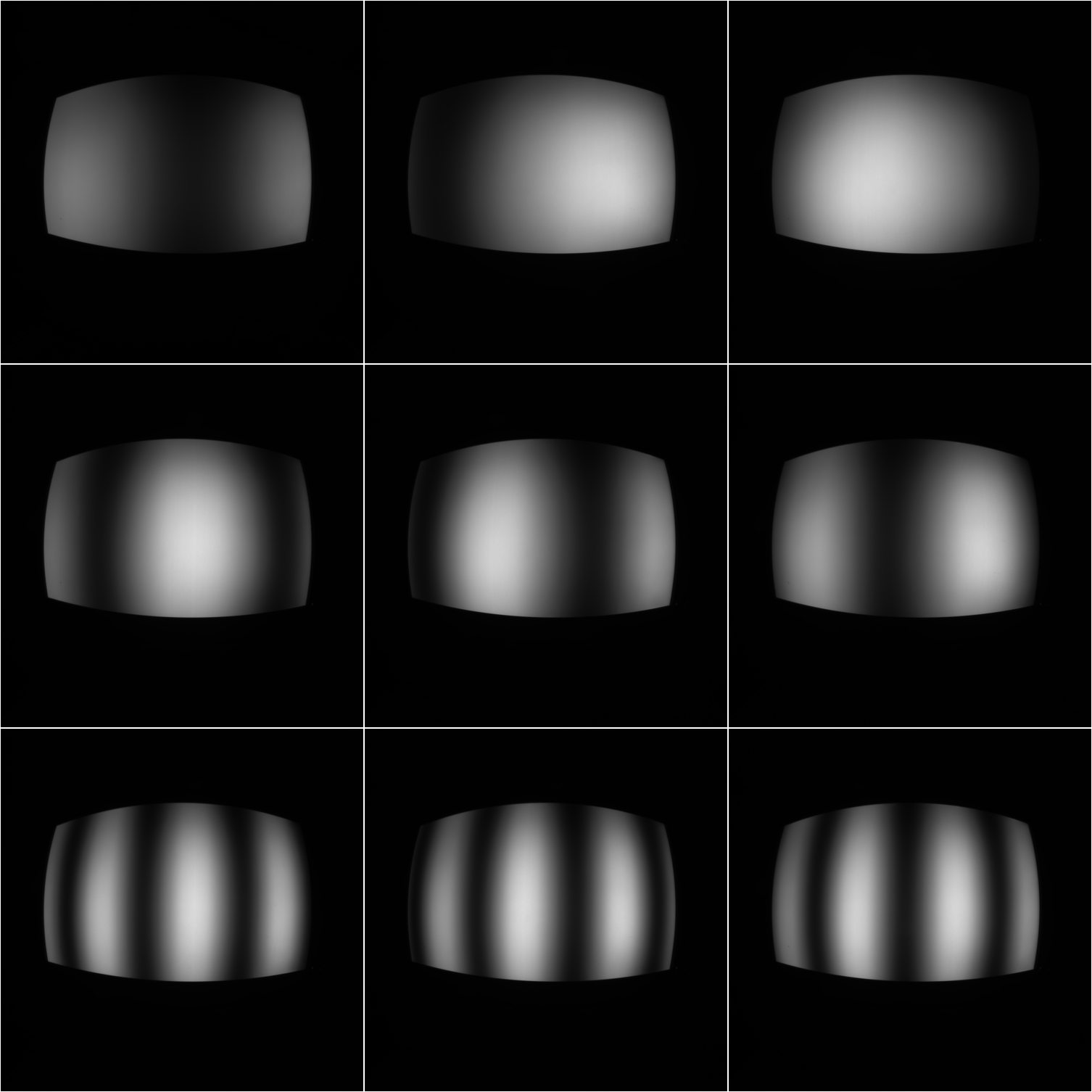
Intrinsic camera calibration
Camera calibration is an essential task in computer vision. It solves the problem of how a 3D point in the world corresponds to a 2D pixel coordinate (intrinsic camera calibration) and how the cameras are located with respect to each other and other sensors (extrinsic camera calibration). -> Project Details
Contact: Dr. rer. nat. Martin Lauer or Dr. Carlos Fernández López